Häufig gestellte Fragen (FAQ's)
Ich kann ein drehzahlgesteuerten kleinen Koaxial Hubschrauber fliegen, kann ich dann den Kaa-350 auch fliegen?
Auf der einen Seite ist der Kaa-350 im Schwebeflug sehr ruhig, und es werden nur wenige Steuerkorrekturen gebraucht um die Position zu halten,
auf der anderen Seite reagiert er aber sehr direkt auf Steuerbewegungen vom Piloten. Das träge und zeitverzögerte Verhalten der drehzahlgesteuerten
Koaxial Hubschrauber ist nicht vorhanden, falsche Steuerbewegungen werden also auch sofort umgesetzt. Der Kaa-350 ist im Schwebeflug und langsamen Rundflug
einfacher zu fliegen als ein normaler heckrotorgesteuerter Modellhubschrauber, weil er einfach ruhiger in der Luft liegt. Bei schnellen Rundflügen, und besonders bei schnellen
abbremsen aus dem Vorwärtsflug und bei Kunstflug sind aber die besondere physikalische Steuereigenarten des Koaxialantriebes zu beachten.
Zum üben für den Anfänger ist auf jeden Fall ein vergrößertes und stabiles Landegestell hilfreich.
Kann der der Hubschrauber eine Kamera heben? Was kann der Hubschrauber noch an Gewicht zuladen?
Den Koaxialtrainer Kaa-350 wurde bis zu einem Abfluggewicht von 2,3 kg getestet. Bei einem Leergewicht (ohne Akku) von knapp 1kg kann also 1,3 kg zugeladen werden.
Geht man von einem normalen Akkugewicht von 200-300gr (entspricht 3s/2200- 3000mAh) aus, kann immer noch mehr als 1kg zugeladen werden.
Auch bei diesem Gewicht ist der Hubschrauber noch sehr gut und sicher steuerbar. Der Flugstil sollte aber dem entsprechendem Gewicht angepasst werden,
d.h. keine abrupten Steuerbewegungen und ein weiches Fliegen um die Belastungen niedrig zu halten. Dieses Abfluggewicht stellt aber trotzdem eine Höchstleistung für den Hubschrauber dar.
Eine ausgiebige Kontrolle aller Teile auf Verschleiß sollte deswegen vor jedem Flug obligatorisch sein.
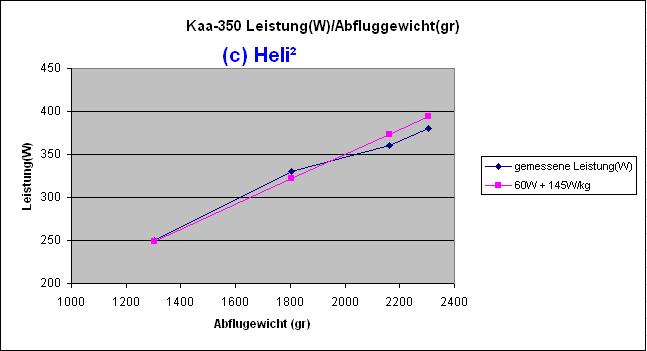 Das Diagramm zeigt die benötigte Leistung in Abhängigkeit vom Abfluggewicht. Bei der serienmäßigen Getriebeuntersetzung
kann als Faustformel mit maximal 60W+ 145W/kg gerechnet werden.
Wird das Getriebe einem bestimmten Abfluggewicht und Steuerverhalten angepasst, so kann man mit deutlich weniger Leistung rechnen.
Bis zu welcher Windstärke kann ich den Kaa-350 fliegen?
Durch die kollektive und zyklischen Blattverstellung beider Rotorebenen ist der Koaxialtrainer Kaa-350 sehr gut für den Outdoor Einsatz geeignet.
Zur Zeit ist er (mangels stärkeren Wind), bis zu einer Windstärke von 16kn (5 Beaufort) getestet worden. Dabei läst er sich noch sehr gut steuern.
Eine Position im Schwebeflug halten stellt bei dieser Windstärke kein Problem dar.
Wie funktioniert die Steuerung des Kaa-350 gegenüber einem drehzahlgesteuerten Koaxial Hubschrauber?
Der Drehmomentausgleich erfolgt bei einem Koaxialhubschrauber durch die Gegenläufigkeit der beiden Rotoren. Das wird aber bei dem Kaa-350, nicht wie bei
den kleinen Koaxial Hubschraubern durch 2 drehzahlgesteuerte Motoren erreicht, sondern nur durch einen Motor und einem Umlenkgetriebe, das realisiert ist durch drei
Kegelzahnräder. Bei der Steuerung der beiden Rotorköpfe wird dann unterschieden zwischen dem zyklischen, kollektiven und differenziellem Pitch.
Zyklische Ansteuerung:
Beide Rotoren besitzen jeweils eine Taumelscheibe zur Ansteuerung der 2 Rotorblätter. Die Ansteuerung der unteren Rotorblätter erfolgt über die untere
Taumelscheibe. Die obere Taumelscheibe ist über Gestänge fest mit der unteren Taumelscheibe verbunden. Die obere Taumelscheibe steuert dann
über den Bell-Hiller Mischer die oberen Rotorblätter an. Bei zyklischer Ansteuerung der unteren TS wird die obere Taumelscheibe gleichsinnig direkt
mit angelenkt.
Kollektiv-Pitch:
Die Pitch-Steuerung erfolgt an beiden Taumelscheiben gleichsinnig. Durch heben/senken der unteren TS wird die obere TS direkt mit angesteuert.
Differenzielles Pitch (Gier-Steuerung):
Die Giersteuerung des Kaa-350 erfolgt durch das CCYP-Mix System. Dadurch wird an dem unteren Rotorkopf beide Rotorblätter kollektiv verstellt.
Es entsteht gegenüber dem oberen Rotorkopf ein unterschiedlicher Auftriebswert und damit auch ein unterschiedliches Drehmoment, welches das
Gieren des Hubschrauber um die Hochachse bewirkt. Damit der resultierende Auftrieb gleich bleibt, also das Modell bein Gieren nicht weg steigt oder absinkt,
kann durch einen elektronischen Mischer im Sender gleichzeitig kollektiv Pitch dazu gemischt werden. Es ist aber nicht unbedingt notwendig, es kann sogar in bestimmten
Flugzuständen gefährlich werden, deswegen wird es nicht empfohlen. Die Erklärung wird in folgenden Grafiken verdeutlicht:
(die angebenden Winkel sind nur als Beispiel zu verstehen. Es soll nur das Prinzip damit erleutert werden)
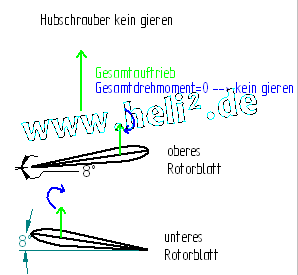
Grafik1: für den Antrieb der beiden Rotoköpfe muss jeweils das gleiche Drehmoment zur Verfügung gestellt werden.
Das Gesamtdrehmoment ist 0, der Hubschrauber fliegt normal gerade aus.
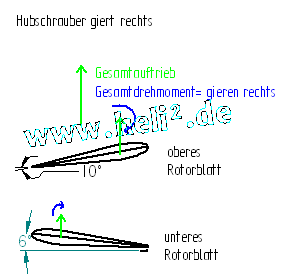
Grafik2: der untere Rotorkopf bekommt weniger Anstelllung, damit der Gesamtauftrieb gleich bleibt, bekommt der obere Rotorkopf mehr Anstellwinkel.
Das Gesamtdrehmoment ist so, das der Hubschrauber sich um die Hochachse nach rechts dreht.
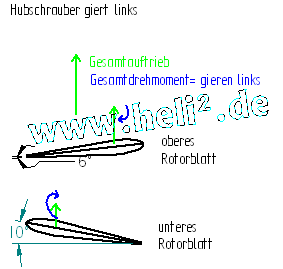
Grafik3: damit sich der Hubschrauber nach links dreht, wird der Anstellwinkel für den unteren Rotorkopf vergrößert. Damit der Gesamtauftrieb gleich bleibt
bekommt der obere Rotorkopf weniger Anstellwinkel.
soweit so gut. Zu beachten ist dann immer nur der Drehmomentunterschied zwischen den beiden Rotorköpfen gesteuert werden kann.
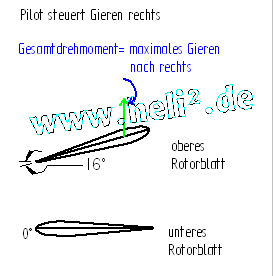
Grafik4: Wird ein elektronische( oder auch eine mechanische) Mischung verwendet dann gilt: Sobald ein Rotorblatt bei 0 Grad ist, kann das Drehmoment nicht weiter anwachsen.
| Pitch oben |
4° |
6° |
8° |
10° |
12° |
| Pitch unten |
4° |
2° |
0° |
-2° |
-4° |
| resultierendes Pitch |
8° |
8° |
8° |
8° |
8° |
| differenzielles Pitch° |
0° |
4° |
8° |
8° |
8° |
Dies führt bei besonders kleinen eingestellten Pichtwinkel dazu, das der Heli nicht mehr oder nur noch sehr träge reagiert:
| Pitch oben |
1° |
2° |
4° |
6° |
8° |
| Pitch unten |
1° |
0° |
-2° |
-4° |
-6° |
| resultierendes Pitch |
2° |
2° |
2° |
2° |
2° |
| differenzielles Pitch |
0° |
2° |
2° |
2° |
2° |
Grafik5: Nun kommt auch noch der Kreisel ins Spiel. Bei der elektronischen Mischung, wirkt die Mischung auf beide Rotorköpfe, der Kreisel aber nur auf den unteren Rotorkopf.
Der Pilot steuert beim Heading Hold modus, die Giergeschwindigkeit. Ist der Kreisel von seiner Wirkungsweise sehr stark eingestellt, so kann folgendes passieren:
Der Pilot steuert weiter nach rechts, der untere Rotorkopt bekommt immer weniger Anstelllung. Da ein negativ angestelltes Blatt aber das gleiche Drehmoment benötigt wie ein positiv angestelltes Blatt,
wird das resultierende Drehmoment immer kleiner, bis es bei noch stärkerem steuern null wird.
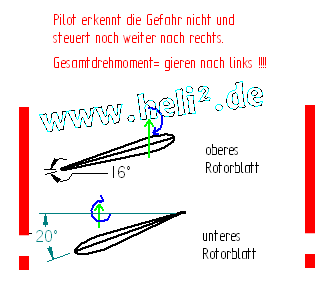
Grafik6: der Pilot versteht nicht, warum der Heli nicht so reagiert wie er steuert, er steuert noch weiter nach rechts. Hat das untere Blatt irgendwann mehr Anstellwinkel als
das obere, dreht sich die Wirkrichtung des Drehmomentes um. Der Hubschrauber kann mit seinem Heck plötzlich in die andere Richtung umschlagen.
!! Dies kann zu einem gefährlichen Flugzustand führen und den Piloten überfordern!!
Abhilfe: Kreisel darf von seiner Wirkung her nicht zu stark eingestellt werden. Mehr Pitch und weniger Gieren geben, dies stabilisiert den Hubschrauber sofort wieder und er reagiert
so wie erwartet. Insgesamt ist das ein Flugzustand der sich vorher ankündigt, der Pilot muss die Zeichen nur richtig erkennen und danach handeln.
Er tritt umso früher auf desto weniger Pitch an den Rotorköpfen anliegt. Also besonders in Bahnneigungsflügen, oder schnellen absteigen.
Dieser Effekt ist stark abhängig von der Hauptrotordrehzahl, den verwendeten Blättern, die Größe des Seitenleitwerkes und der Grundeinstellung des Hubschraubers.
Verwenden Sie deswegen nur die empfohlenen Rotorblätter, Motor und Getriebeuntersetzung. Achten Sie unbedint darauf, das ihre Grundeinstellung mit der Anleitung übereinstimmt.
Verwenden Sie das Seitenleitwerk mit den aufgeklebten Flächen.
wird fortgesetzt.....
|  back
back